熊大からくりサークル
部員随時募集中!!
NHK学生ロボコン2025
2025年度NHK学生ロボコンの本戦出場を目指してNHK学生ロボコンにエントリーしました。結果としては2次審査ビデオの審査をパスできずに終わりましたがレベルが着実に上がっているように思いました。ここでは制作過程についてまとめて行きます。
ルール概要
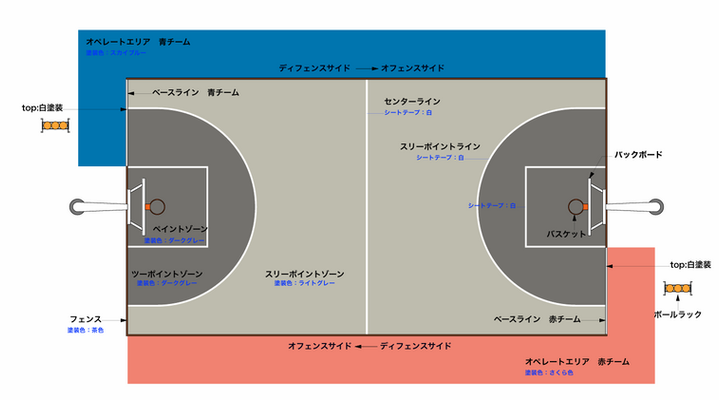
今年のNHK学生ロボコンのテーマは「バスケットボール」でした。大まかに以下のようなことを20秒以内に行います。
・ベースラインでボールの装填
・センターラインまで移動して味方ロボットにパスを行うorドリブルを行う
・オフェンスサイドでシュートを決める
今年度の競技は近年の競技と異なり対戦型の競技なので相手の動きを想定した競技となりました。
制作過程
今年の競技で一番むずかしかった動きは「シュート」でした。実際に「シュート」はバスケットボール(600g)をバスケットリングの高さ(2.43m)以上の投擲を行う動作です。例年だとボール(200g)程度を1mはなれた場所に投げるみたいな感じがものがここまでスケールが上がってのでとっても作成が大変でした。わたしたちはこの方法としてバネを使った直線加速方式の射出機構を作成しました。
メカ的な成長としてはCNCの加工技術を開拓しました。今までのフライス加工を自動に行えたので金属加工に幅が出てロボットの強度がましました。
制御的な成長としてはNUCを使ったロボット制御ができた点です。もともとROSについての開拓がありましたがハードウェアがraspiしか使っていませんでした。そのため、ハードウェアを一気にパソコンレベルまで上げることができました。その他にもwebでのwifi通信やRTOSを使った並列処理など作成を通して技術が進歩したように感じました。

▲CNCで加工したL字アルミ

▲NUCを使った制御回路

▲バネを使った射出機構

▲webページでロボット操作
ロボット紹介
結果は2次審査落ちと作成したロボットたちが日の目を浴びなかったのでここでどんなロボットを作ったのか簡単に説明していきます。
Sロボット

このコンテストでのメイン機体であるロボットがこのSロボットです。このロボットにはドリブル、シュート、パスの受け取りを行う機構をつけています。これから各機構について簡単に紹介していきます。
Sロボット機構紹介
ドリブル機構
パス受け取り機構
シュート機構

ボールを自由落下でバウンドさせてつかむ機構にしました。単純な仕組みですが確実にドリブルができる機構になりました。

パス受け取り機構の工夫したポイントは取った後写真の左側にボールが自然に移動する仕組みを作ったところです。

今回一番出来が良かった機構がこのシュート機構でした。実際に2Dエリア内ならどこからでもシュートが入れる出来となりました。
Lロボット

パス機構

パス機構では2つのローラを使ってボールを送り出す機構となっています。
このコンテストでのサブ機体であるロボットがこのLロボットです。このロボットにはパスと妨害を行う機構をつけています。これから各機構について簡単に紹介していきます。
妨害機構

妨害機構ではパスやシュートでボールが宙に浮いたところを止めるための機構です。